Firmware 2.0
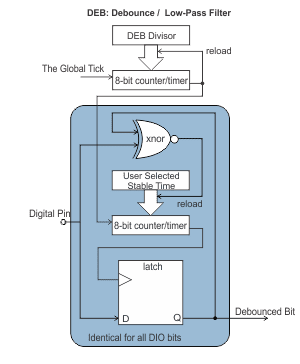 Debouncing provides a way to avoid the vagaries of mechanical contact bounce from confusing your software and users. By commanding the onboard intelligence to monitor the inputs and filter out contact bounce you avoid needing to add low-pass filtering circuits to each of your button and relay digital inputs. Firmware 2.0 allows flexible debouncing time constants from tens of microseconds to hundreds of milliseconds, per bit, compatible with the widest variety of contact closures, on all digital bits of each device.
Debouncing provides a way to avoid the vagaries of mechanical contact bounce from confusing your software and users. By commanding the onboard intelligence to monitor the inputs and filter out contact bounce you avoid needing to add low-pass filtering circuits to each of your button and relay digital inputs. Firmware 2.0 allows flexible debouncing time constants from tens of microseconds to hundreds of milliseconds, per bit, compatible with the widest variety of contact closures, on all digital bits of each device.
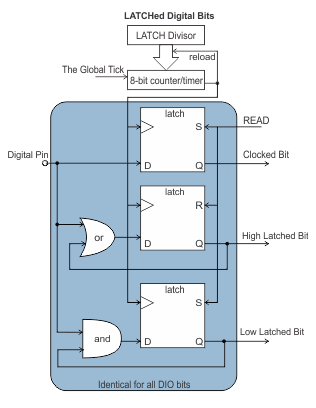 Mapping occurs periodically, automatically copying input bits to output bits. This can be used to isolate or buffer signals, or to synchronize edges. Copy a TTL input bit to a Relay output bit, for example; or copy 8 TTL inputs to 8 TTL outputs to buffer and synchronize edges to the period specified. Up to 32 digital matrix mapping operations can be configured per device.
Mapping occurs periodically, automatically copying input bits to output bits. This can be used to isolate or buffer signals, or to synchronize edges. Copy a TTL input bit to a Relay output bit, for example; or copy 8 TTL inputs to 8 TTL outputs to buffer and synchronize edges to the period specified. Up to 32 digital matrix mapping operations can be configured per device.
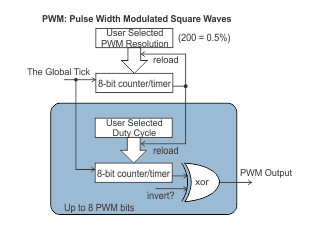 PWM output bits generate square waves, with configurable duty cyle andpolarity. Up to 8 digital outputs can be performing PWM output at the same time, per device.
PWM output bits generate square waves, with configurable duty cyle andpolarity. Up to 8 digital outputs can be performing PWM output at the same time, per device.